
Localization with software defined radio (SDR) and time difference of arrival (TDOA)
Distributed localization with multiple sensors is an established alternative to satellite based solutions for many special applications such as indoor navigation or wildlife tracking. At TI a testbed for real-time localization has been developed using software defined radio (SDR). The localization is performed with the principle of time difference of arrival (TDOA). TDOA requires a very accurate localization among the sensor nodes. The following demo video shows the system performing pedestrian tracking with three sensors in front of the ICT cubes building.
Hardware
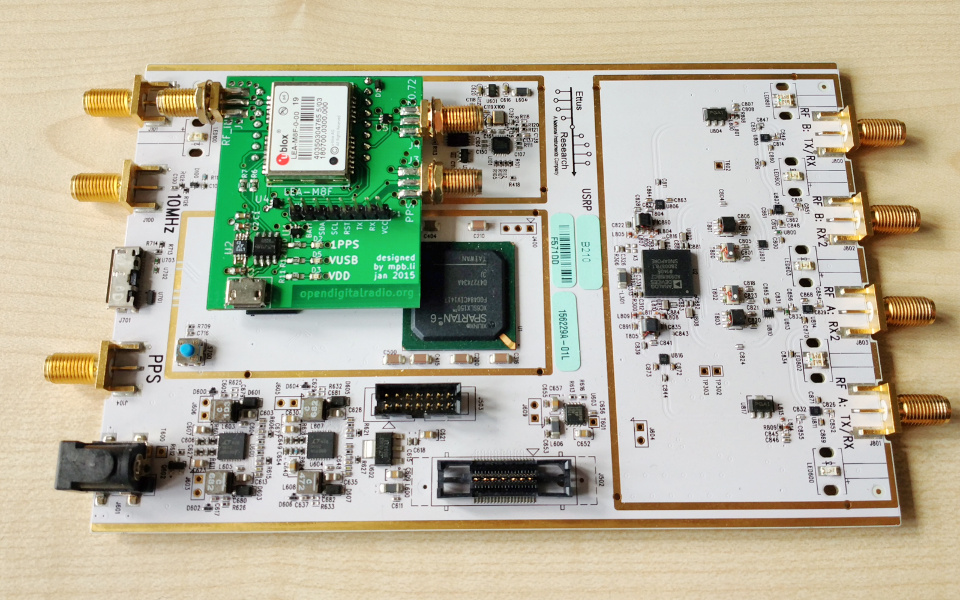
The sensors are built with Ettus USRP B210 frontends, augmented with a ublox LEA-M8F GPS disciplined oscillator (GPSDO) as depicted in the picture bellow. With the GPSDO it is possible to achieve synchronization in the order of 5 ns and keeping the sensors wireless. Backhauling of the IQ-baseband samples collected by each individual sensor is achieved over a IEEE 802.11 WLAN (Wi-Fi) link.
Software
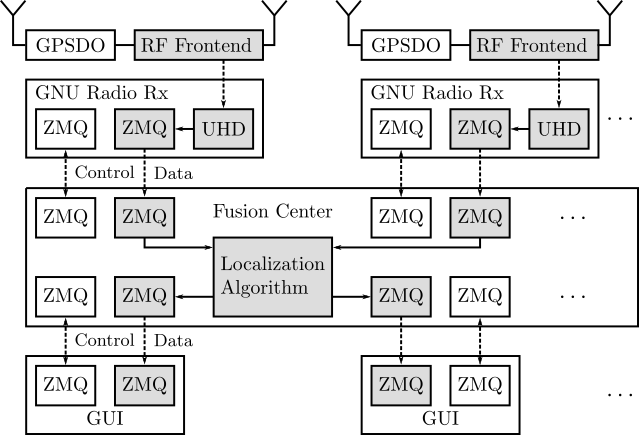
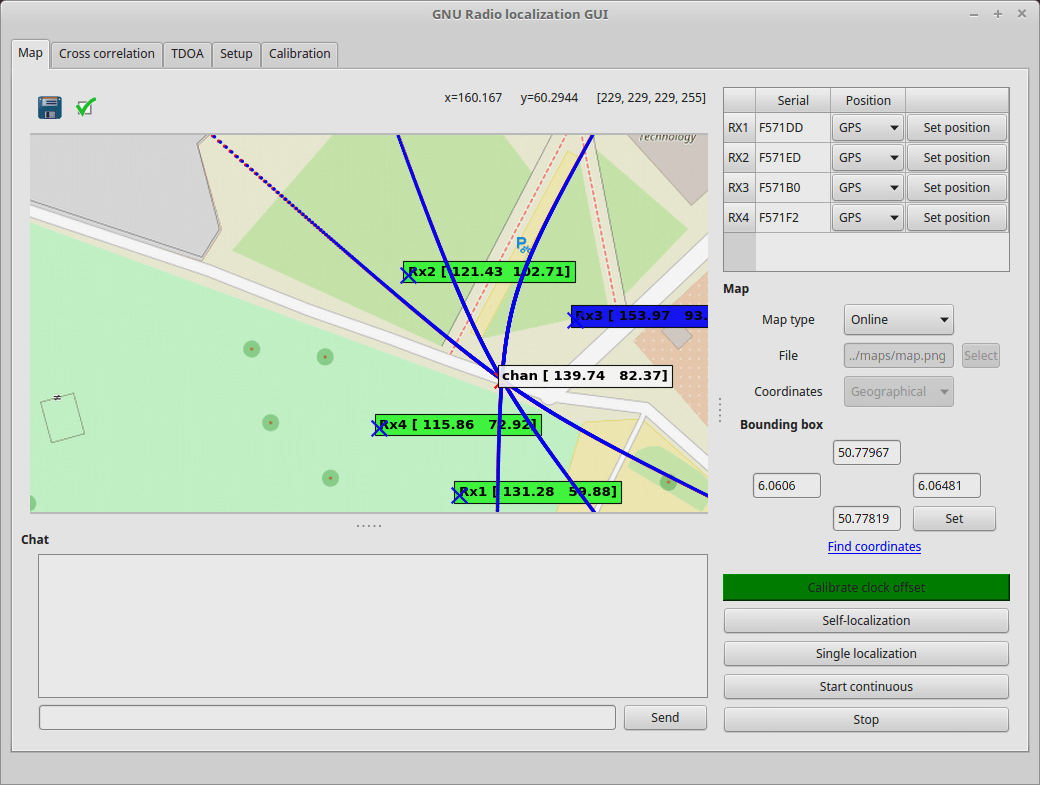
The software framework of the localization system is based on GNU Radio and ZeroMQ. GNU Radio is a software defined radio library that provides blocks to interface with the RF frontends and to perform stream based signal processing. In this project the localization algorithms are calculated in a central location known as fusion center. Therefore, it is necessary to transport the signal samples provided by GNU Radio over the backhauling link using an IP-based protocol. For this the ZeroMQ library has been selected as it provides a simple interface to robust low level network programming methods. The result of the localization algorithms is displayed in a graphical user interface (GUI). Additionally the GUI provides functionality to control the sensors and the fusion center.
Related publications
- S. Shojaee, J. Schmitz, R. Mathar, S. Toledo, On the Accuracy of Passive Hyperbolic Localization in the Presence of Clock Drift, Proceedings: IEEE International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Montreal, QC, Canada, October 2017.
- J. Schmitz, F. Bartsch, M. Hernández, R. Mathar, Distributed Software Defined Radio Testbed for Real-time Emitter Localization and Tracking, Proceedings: IEEE ICC 2017 Workshop on Advances in Network Localization and Navigation (ANLN), Paris, France, May 2017.
- J. Schmitz, S. Toledo, R. C. H. Reyes, S. Shojaee, V. Radhakrishnan, R. Mathar, Differential Multidimensional Scaling for Self-Localization of TDOA Sensor Networks, Proceedings: 2017 IEEE Wireless Communications and Networking Conference (WCNC), San Francisco, CA, USA, March 2017.
- J. Schmitz, M. Hernandez, R. Mathar, Demonstration Abstract: Real-time Indoor Localization with TDOA and Distributed Software Defined Radio, Proceedings: 15th ACM/IEEE International Conference on Information Processing in Sensor Networks (IPSN), Vienna, Austria, April 2016.
- J. Schmitz, F. Schröder, R. Mathar, TDOA Fingerprinting for Localization in Non-Line-of-Sight and Multipath Environments, Proceedings: 2015 International Symposium on Antennas and Propagation (ISAP) , Hobart, Tasmania, Australia, November 2015.
- J. Schmitz, D. Dorsch, R. Mathar, Compressed Time Difference of Arrival Based Emitter Localization, Proceedings: The 3rd Int. Workshop on Compressed Sensing Theory and its Applications to Radar, Sonar and Remote Sensing (CoSeRa 2015), Pisa, Italy, June 2015.
Code
- Available on github .
Contact
For further information contact Johannes Schmitz.
![]()
 Maintained by:
Detlef Maus,
Ansgar Johannes Pflipsen
Maintained by:
Detlef Maus,
Ansgar Johannes Pflipsen
Design by: Peter Schwabe
Data Privacy Statement
(last update 2020-06-29)
***
Aktuelle Informationen gemäß Art. 13 DS-GVO:
Datenschutzhinweis ***
Impressum ***